
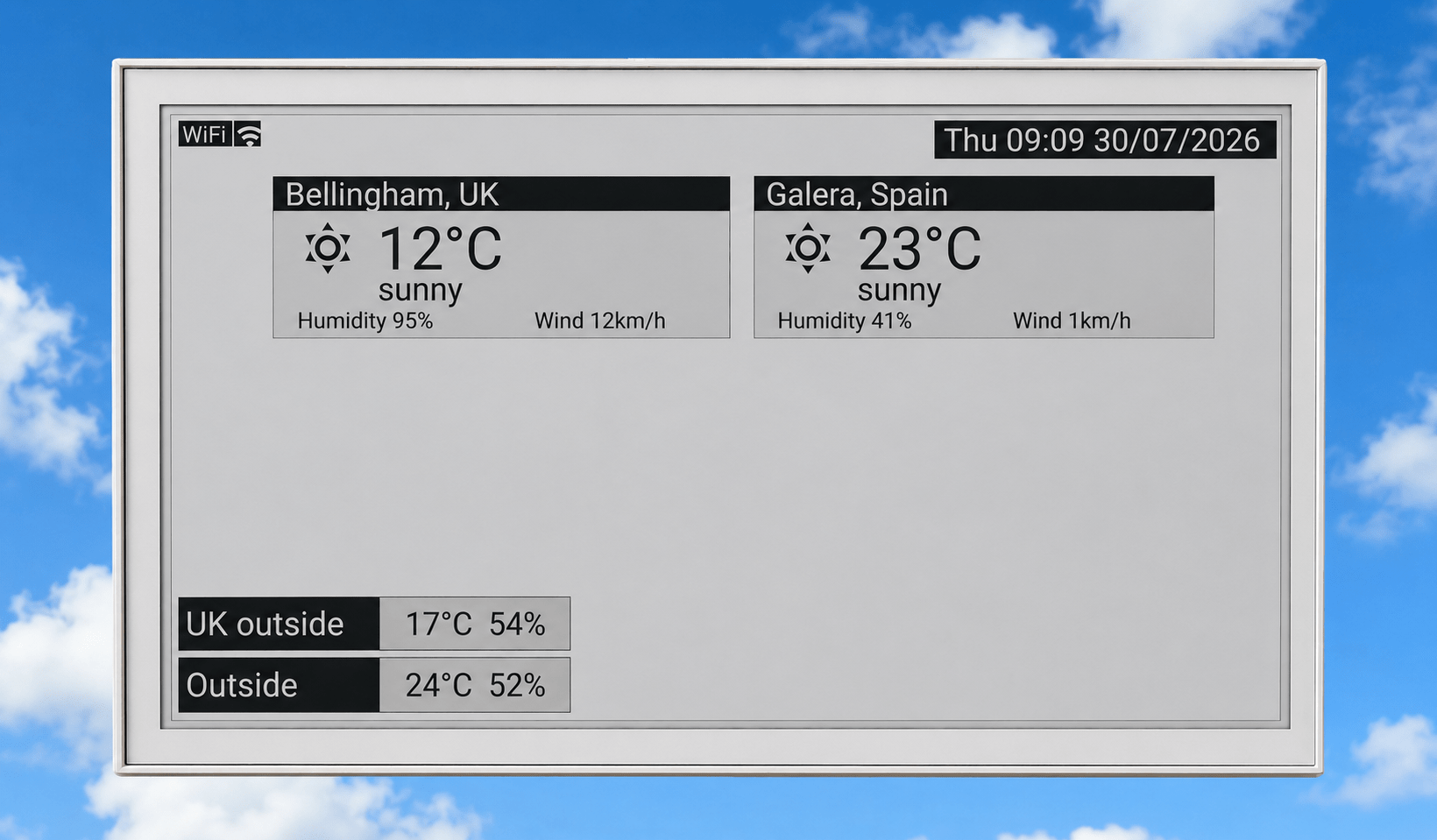
This blog entry has ended up as a multi-day job thanks to the reTerminal E Series E1003 10.3″ display being fairly new and information being scattered all over – I’m sure I’ve helped Seeed update their info and so if this interests you, between my final ESPHOME YAML code at…
Sonoff Advanced TH Pressure SNZB-02M

The SNZB-02M is a small round sensor from Sonoff that not only checks temperature and humidity – but also air pressure. Nothing new there at chip level but most ready built sensors out there leave pressure out for whatever reason. The Zigbee-based SNZB-02M doesn’t. Nice small round device – but…
The Horrendous Oukitel P2001E and it’s DIRE app WONDERFREE
I’m using the Oukitel P2001E Lithium 2KW battery system and the app they had a third party create for them. No API, the app doesn’t work reliably – and there is NO support from either company. Here’s my original article covering generators and other stuff as well as the Oukitel.…
Sonoff HYDRO DUO+ BSP Zigbee Smart Water Valve
Back in July 2024 I wrote about the then new Sonoff Smart Water Valve (BSP) – with a follow-up in December as on initial release, the device wasn’t quite complete – by December they’d cracked it… and then along came the Nous L14 smart water valve – When we moved…
Sonoff BASIC ZB1GSP Din-Rail Switch
For something a little more meaty than the average Zigbee smart switch, how about the new Sonoff Basic ZB1GSP din-rail breaker? This arrived from me a couple of days ago and I’ve just plugged it in now, no messing about. It’s Zigbee. I just plugged the two top connections, live…
Sonoff BASIC-1GSP Din Rail Smart Switch
If this post looks familiar. That’s because it’s very similar to the one I’ve just finished on the new Sonoff Basic-1ZBGSP din-rail breaker – but this one runs on WiFi over MATTER. This arrived from me a couple of hours ago and I’ve just plugged it in now, no messing…
Sonoff Mini-ZB1GSP Power Monitoring Switch
I hope I have that right – this is another brand new Zigbee 3.0 device from Sonoff – and once again it’s a safe bet that it can be used either with the eWeLink app or bypass that altogether and use it directly in Home Assistant with the Zigbee2MQTT add-in…
Sonoff Mini PM – Endlessly Shrinking Power Monitors
This morning the brand new Sonoff Mini PM arrived on my desk. The PM stands for power monitoring and this is a truly TINY PM (power monitor) (not switch), comparing well in that respect with other manufacturers I’ve come across. Which is why I wonder, with such a marvellously small…
XTU S7 Pro – 4k Flagship Action Camera

Can it possibly be that long since I reviewed an action camera? Apparently yes. It was 2017 when I reviewed the ODVRM Action Camera. And here we are – we’ve moved home at least twice since then, I’ve gone from using cheap mobile phones to the Samsung S24 Ultra and…
You’re not going to believe this – A Sonoff BOX
Sonoff aer well known for a wide range of controllers – smart switches, smart plugs, sensors and more – I think they were one of the first companies I started writing about back around 2016 – but a BOX? The container merely says “IP65 Outdoor Waterproof Box” – and shows…
Two New Products – Sonoff Airguard and SenseGuard
Specifically the new Airguard TH Lite and the SenseGuard Motion Gen2. These two products arrived on my desk this morning – once again Sonoff are on the march with new products and I’m sure they won’t disappoint. So firstly these are both Zigbee and regular readers will know I’m a…
GL-iNet Comet Q Remote KVM

Regular viewers will know I reviewed several KVMs a while back and now I have the very new Comet Q from GL-iNET. The Comet Q is WEIRD. All you get in the box is the round, black Comet Q, a removeable orange protective sleeve and instructions. This tiny device has…
Cheap AliExpress 4-Button Scene Switch
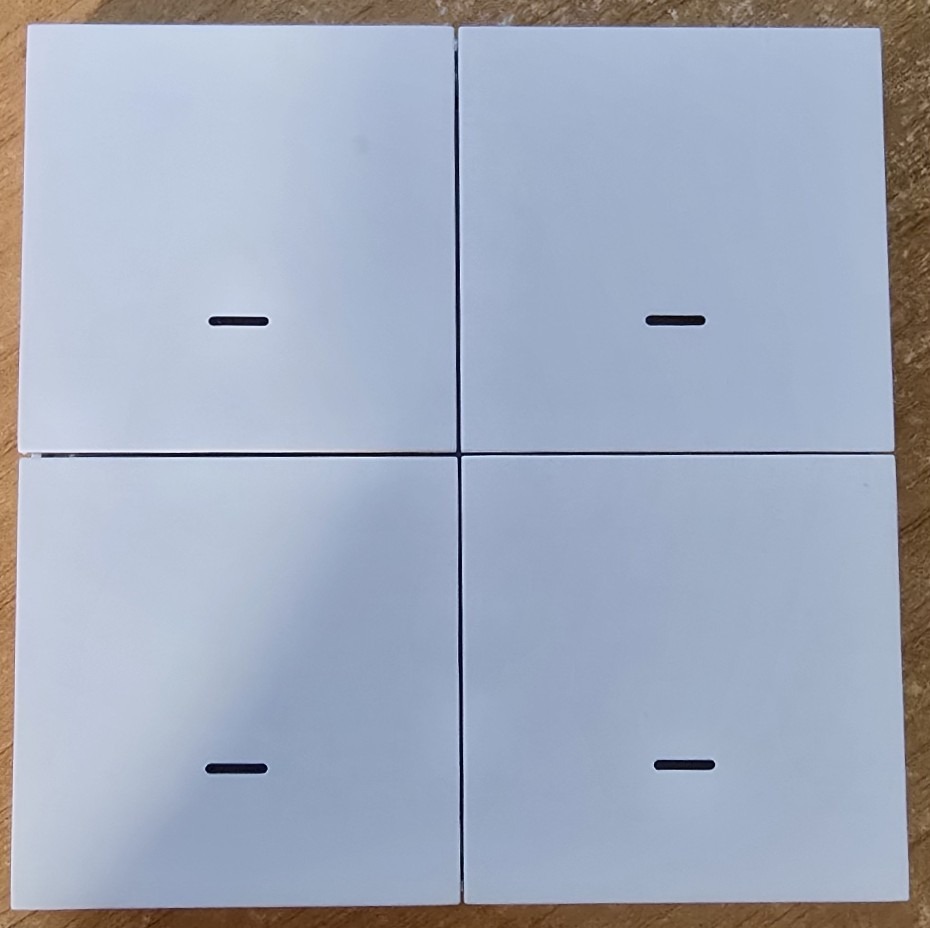
Back in 2021 I wrote about the Aqara 1, 2 and 4 way scene switches. Great idea, at the time I had limited use for them. A lot has happened meantime and the Zigbee scene switches they sent me are now in use in our new home. I also have…
The Nous L14 Zigbee Smart Water Valve

Original November 2025 – update June 2026 You might want to look up my Sonoff BSP article from December 2024 for comparison – as the L14 device is in many ways similar to the BSP. The Nous L14 is a Zigbee smart water valve. It is compatible with Zigbee2MQTT, Google…
The IoTorero Presence Sensor PS02C3MZ

You can guess why the “C3” in the name – an ESP32-C3 chip at the heart. By now, I’m well familiar with modern radar presence sensors, having used and reviewed the Seed product and various from Apollo to name and several others. I wrote this blog entry on January 7,…
Matter-Enabled Switchbot Hub Mini
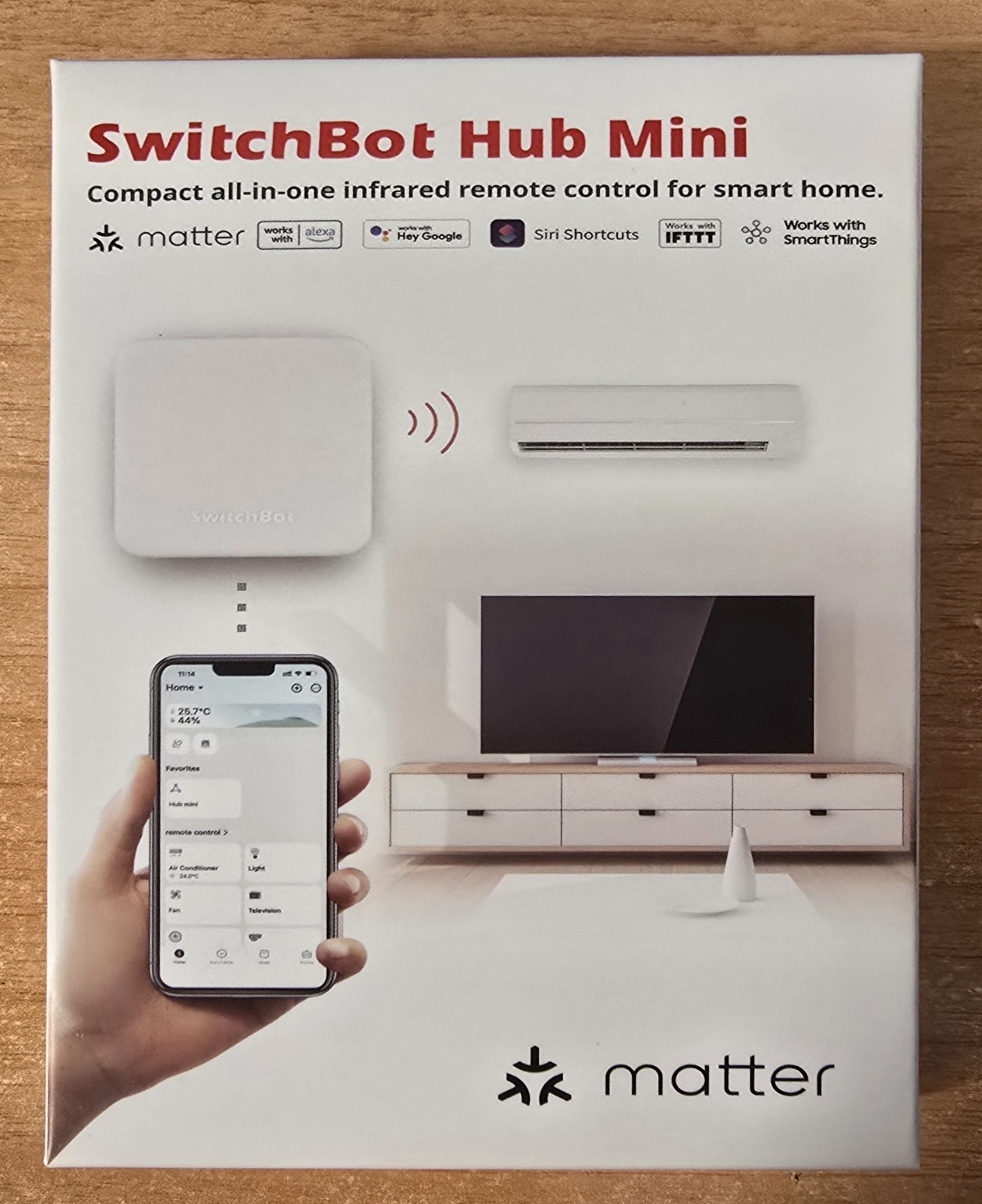
Back in June 2025 I wrote about the Switchbot Hub Mini vs Hub 2. I still have my Hub2 and Hub3 devices – but when a package arrived in the post this morning – Hub Mini – I thought – lets have a look. The only problems is – and…
Switchbot Standing Circulator Fan (Smart)

This new new Switchbot battery-powered rechargeable floor-standing fan is for the most part GREAT. It’s quiet, neat-looking and works just fine stand-alone, in the Switchbot app, with the Switchbot Hub 3 desk unit and to an extent – within Home Assistant. The fan turned up unexpectedly this morning – I…
A Tale of Two Battery Packs
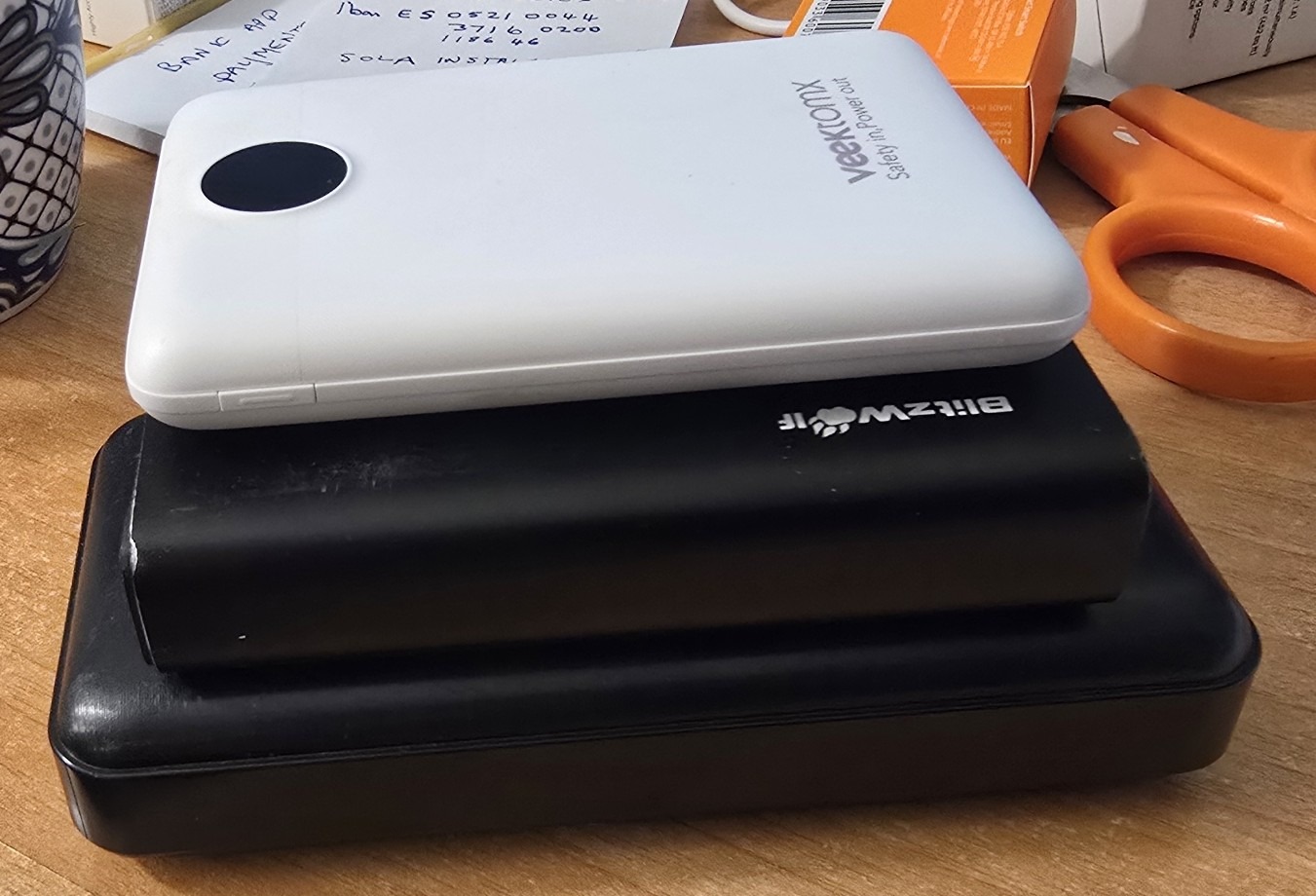
More precisely, two battery pack types. Just a little something that some of you might find useful. As you may know, we moved into a new home a little while back with no electricity so I bought a generator and an Oukitel lithium power unit (wish I’d bought a Bluetti)…
Sonoff S61S Outdoor Matter over WiFi Smart Plug
According to the Box this new Sonoff product is a Matter-compatible outdoor smart plug that runs on Wi-Fi, with: smart timer, Matter compatibility, energy overview, electricity bill tracking, overload protection and overcurrent protection. This is the EU version but there will be versions for the UK and USA etc. Details:…
Sonoff NSPanel Pro GEN2
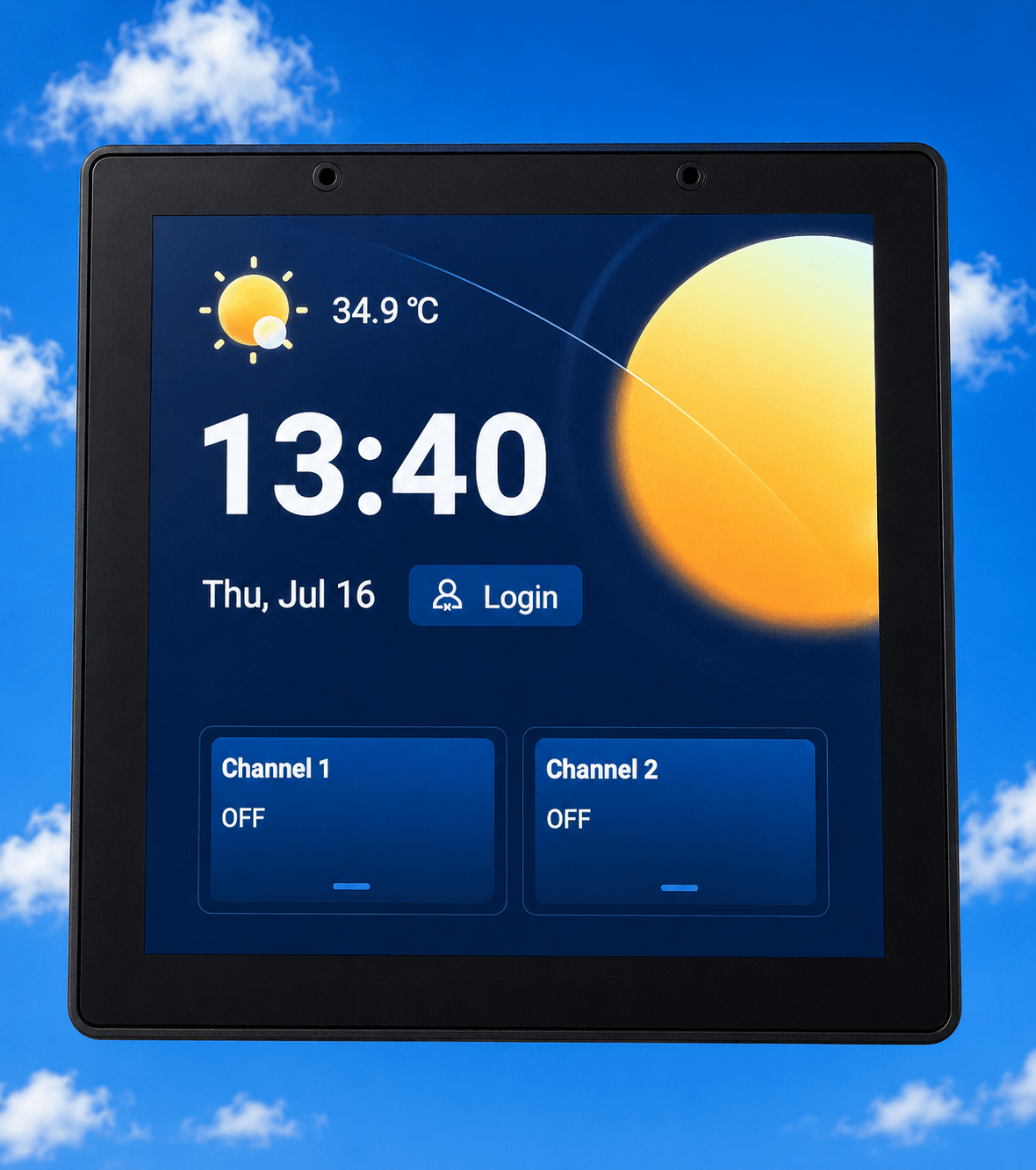
This is a short writeup about the new sonoff NSPanel Pro Gen 2. Up to now I have my doubts… 2 real buttons switching relays like the original NSPanel (not the original Pro) – Nice touch screen and lots of promises. There is a case for this or it can…